カメラおよび回転テーブルのキャリブレーション法
立体物を3次元モデル化する方法として、多くの形状計測法が提案されています。 次世代コンテント研究室では、その中のイメージベースドモデリングをベースに 実写映像に基づいた立体物の高精細な3次元形状の計測方法について、 研究開発を進めています。
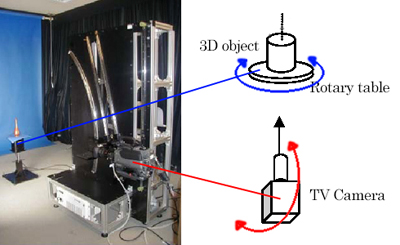
この研究開発の開始とともに、図1の実験用撮像機構装置を導入しています。 この装置では、立体物を水平・垂直両方向に回転した画像を取得することができ、 また、カメラの垂直同期信号に同期して駆動されるので、 位置再現精度を極めて高くすることが出来ます。
|
|
|
この実験装置を用いて実験を重ね、我々研究室では、 立体物形状の高精細な計測法として、 回転テーブル上に置いた立体物を、指定した位置・角度からハイビジョンカメラで撮影し、 得られた複数のフレーム画像から、高精細の立体物の形状データを取得する 「2段階のブロックマッチング法」を開発、提案しています。
それと同時に、この手法で計測を行う前段階に必要となる、 カメラキャリブレーションと回転テーブルの回転軸キャリブレーションの手法についても、 実験、研究を行ってきました。
キャリブレーションの目的は、カメラ・回転軸の3次元的な位置関係 (3次元座標系)を定義することにあります。 計測の基になる撮影画像は、あくまでも2次元ですから、 そこから3次元モデル化を行う際に、カメラの3次元的な位置関係が必要になるのは、 直感的にも合点のいくことと思います。
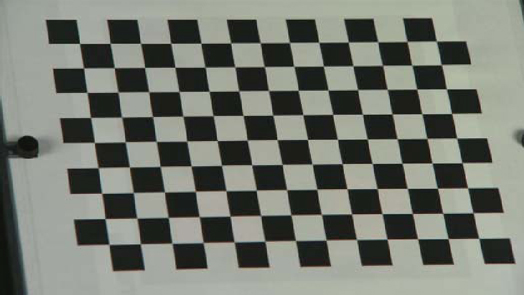
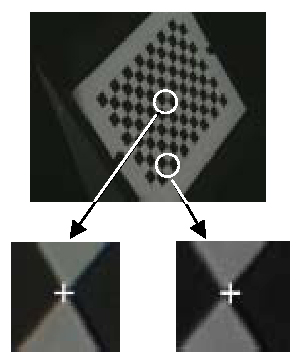
キャリブレーション時には、図2のような白黒チェックボードを用意します。 これを回転テーブルに載せて回転させ、それをカメラで撮影してシーケンス画像を作ります。 そして、チェックボードパターンの各矩形の角を特徴点として抽出し(図3)、 それらの3次元位置と画像上の位置(2次元)の対応を利用してキャリブレーションを行います。 結果的に、カメラ・回転軸の3次元的な位置関係、そしてカメラの焦点距離等を 求めることが出来ます。
|
|
|
|
|
|
キャリブレーションの精度は、その後の立体物計測精度に大きく影響を与えます。 故に、キャリブレーションの研究は、我々の研究全体の根幹にあたる、 非常に重要な基礎研究でもあります。
このページに関する問い合わせは info@adv3d.jp まで。